NASA’s next lunar rover to use free software
Being born in the mid-50s, some of my main childhood memories include the Cold War rivalry of the “Space Race” between the then USSR and the USA, all reinforced by such TV fare as Jerry and Sylvia Anderson’s Fireball XL5.
These have stayed with me throughout life and I still follow human achievements in space closely.
Coming hard on the heels of the Ubiquity helicopter’s first flight on Mars (posts passim), German IT news website heise reports that NASA’s next lunar rover will also be powered by free and open source software.
In 2023 NASA will launch its Viper (Volatiles Investigating Polar Exploration Rover) rover which will be searching for and mapping water ice (which could one day be used to make rocket fuel) on the Moon’s surface. The rover will be equipped with high-tech instruments and tools: wheels which can revolve well on the dusty lunar surface; a drill which can dig into the lunar soil and hardware which can survive the lunar night which lasts 14 days and during which temperatures can drop to -173 degrees Celsius.
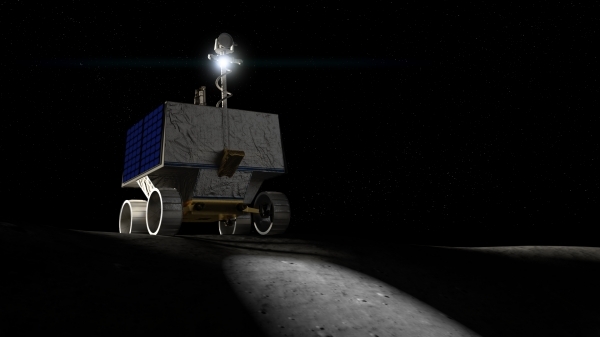
Whereas Viper’s equipment is largely bespoke, the rover will run mostly on open source software which can be freely used and adapted. If the mission is successful, it will not only lay the foundations for a future Moon colony, but also enable the aerospace industry to develop and operate its robots in a different manner.
Open source technology has been little thought of to date in respect of space missions. It costs vast sums to build something space-worthy which can find its way to a target hundreds of thousands of kilometres away and carry out its specific tasks there. The natural impulse is usually to conceal the necessary know-how. On the other hand, open source software is often associated with cobbled-together programming for small projects such as hackathons or student demonstrations. The programming code that fills online repositories like GitHub is often a cheap alternative for groups with little money and few resources.
Into space with open source
The aerospace industry is being propelled forward by many factors, not least the increasing drive into space. This also entails a demand for cheap and accessible technologies, including software. Even for major organisations like NASA, for whom funds are less of a problem, the open source approach can result in better software. With open source, scientists can access additional expertise and feedback from a wider community when problems arise, just as amateur developers do.
If open source software is good enough for the likes of NASA, it should probably also be good enough for everyone else trying to control a robot remotely from Earth. As ever more new companies and new national agencies throughout the world are trying to send their own hardware into space and at the same time keep costs down, cheaper robotics software able to cope with risky missions could be a major benefit.
 NASA has already been using open source software for 10-15 years in several research and development projects. It manages a very comprehensive range of open source program code. However, its use for space robots is still in the initial stages. One of the systems the agency has tested is the Robot Operating System (ROS), a collection of open source software frameworks which is maintained by Open Robotics, a non-profit which is based in Mountain View, California. ROS is already used in the Robonaut 2 humanoid robot, which has assisted in the International Space Station’s research, and in the autonomous Astrobee robots, which float around the ISS supporting astronauts in their routine tasks.
NASA has already been using open source software for 10-15 years in several research and development projects. It manages a very comprehensive range of open source program code. However, its use for space robots is still in the initial stages. One of the systems the agency has tested is the Robot Operating System (ROS), a collection of open source software frameworks which is maintained by Open Robotics, a non-profit which is based in Mountain View, California. ROS is already used in the Robonaut 2 humanoid robot, which has assisted in the International Space Station’s research, and in the autonomous Astrobee robots, which float around the ISS supporting astronauts in their routine tasks.
The ROS will carry out ground flight control tasks. NASA staff will control the Viper rover from Earth. Ground flight control will then use the data collected by Viper for a real-time map and rendering of the lunar environment, with which the rover’s drivers will then be able to navigate more safely. Other parts of the rover’s software also have open source roots: the “Core Flight System” (cFS) program, which NASA developed itself and made available free of charge on GitHub, is responsible for basic functions like telemetry and on-board file management. Viper’s mission operations beyond the rover will be carried out by Open MCT, another NASA development.
Viper will be controlled in real time – almost
In addition, the Viper mission is suitable for open source software. Because the Moon is so close, the rover will be able to be controlled almost in real time, meaning that part of the software does not need to be on the rover, but can be run on Earth instead.
However, Viper doesn’t run fully on open source software. For example, its onboard flight system uses reliable proprietary software. Nevertheless it can be assumed that future missions will both use and extend the open source software used for the Viper mission.